
机械臂的工作原理: 一般机构可由电力、液压、气动、人力驱动。机构有螺纹顶紧机构(如台虎钳)、斜锲压紧、 导杆滑块机构(破碎机常用)、利用重力的自锁机构(如抓砖头的🚁 米乐m6官方网站)等等。还有简单的:如可用气(液压)缸直接夹紧的。 底座是用来安装和固定机器的。
机械手主要由手部、运动机构和控们制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被🏀 米乐m6官方网站抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
利用浮沉拿首乎在外加压强作罗用下,改变它的排水体积。 浮沉炉的浮沉是在外加压强作用下,靠改变它的排水体积来实现的。当空气被压缩时,将压强传递给水,水被压芹戚入瓶体中,将瓶体中的空气压缩,浮沉子里进入一些水,消悉排水体积不变,所受的重力大于它受到的浮力,向下沉。
以翅片式散热器和不锈钢加热管为热源,利用大尺拿风机对加热总成对流换气困隐的方式加热空气,通过热空气与物料的热滚搭量传递,空气通过进风口不断补充。
机械臂是高精日度,高速点胶机器手。对🆙 应小批量生产方式,提高生产效率。除点胶作业之外,可对应uv照射,零件放置,螺丝锁定,电路板切割等各种工作。
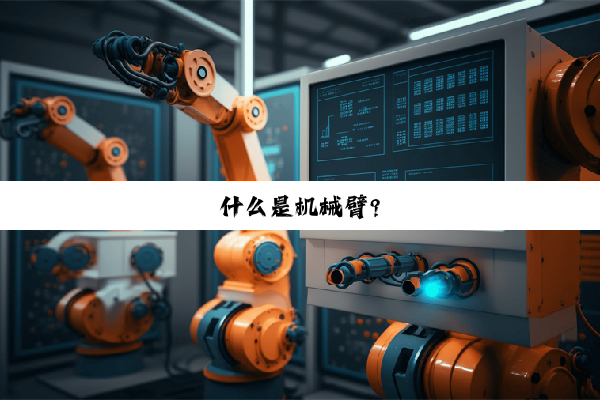
机械臂是目前在机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务来自、军事以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。
底座是用来安装和固定机🈵 器的。 油箱是装润滑油或液压油循环的。 升降位置检测器,要么是确定物体或机器部件是否位于某几个预定高度位置,要么是实时检测其高度的。
随着机器人系统向着高速、重载、高精度,机器人部件向着轻质的方向发展,这必然使得构件的弹性变形增大,造成了与其机器人运动平稳性、准确性的矛盾,从而突出了机器人各部件弹性变形的影响。












